Target Recognition and
Grasp Pose Detection Technology Based on YLG-CNN Network
Wang Yicheng1,2, Zhang Guoliang1,2, Wang Kun1,2, Zhang Zijie1,2
(1. School of Automation and Information Engineering, Sichuan University of Science & Engineering, Yibin, Sichuan 644000; 2. Key Laboratory of Artificial Intelligence in Sichuan Province, Yibin, Sichuan 644000)
Abstract and Keywords
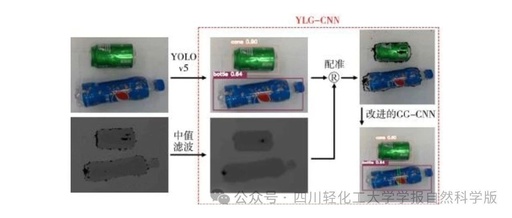
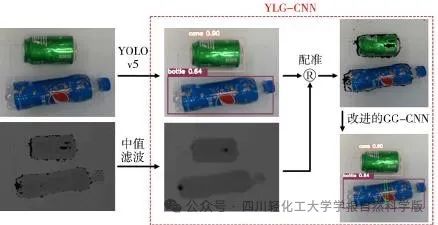
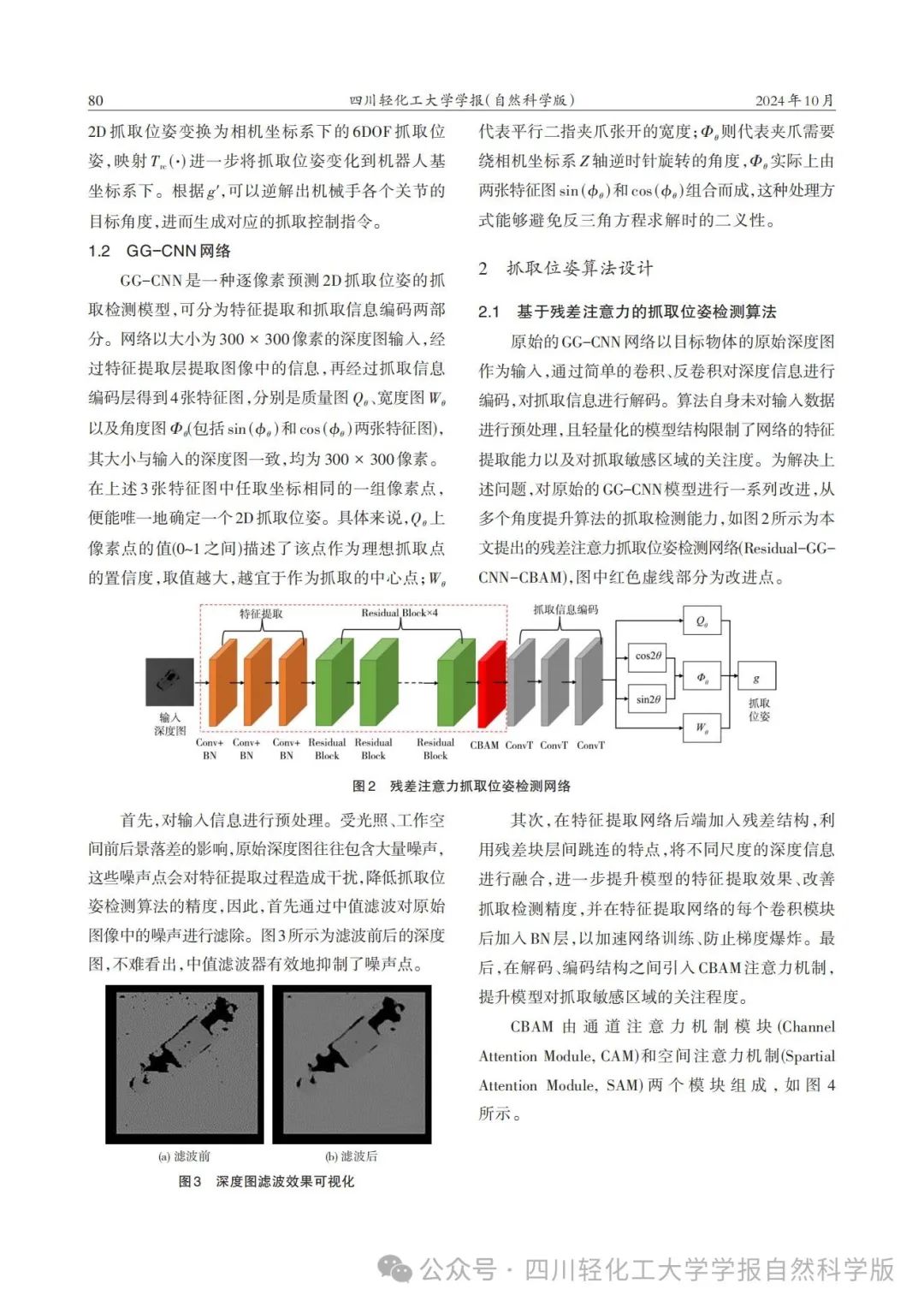
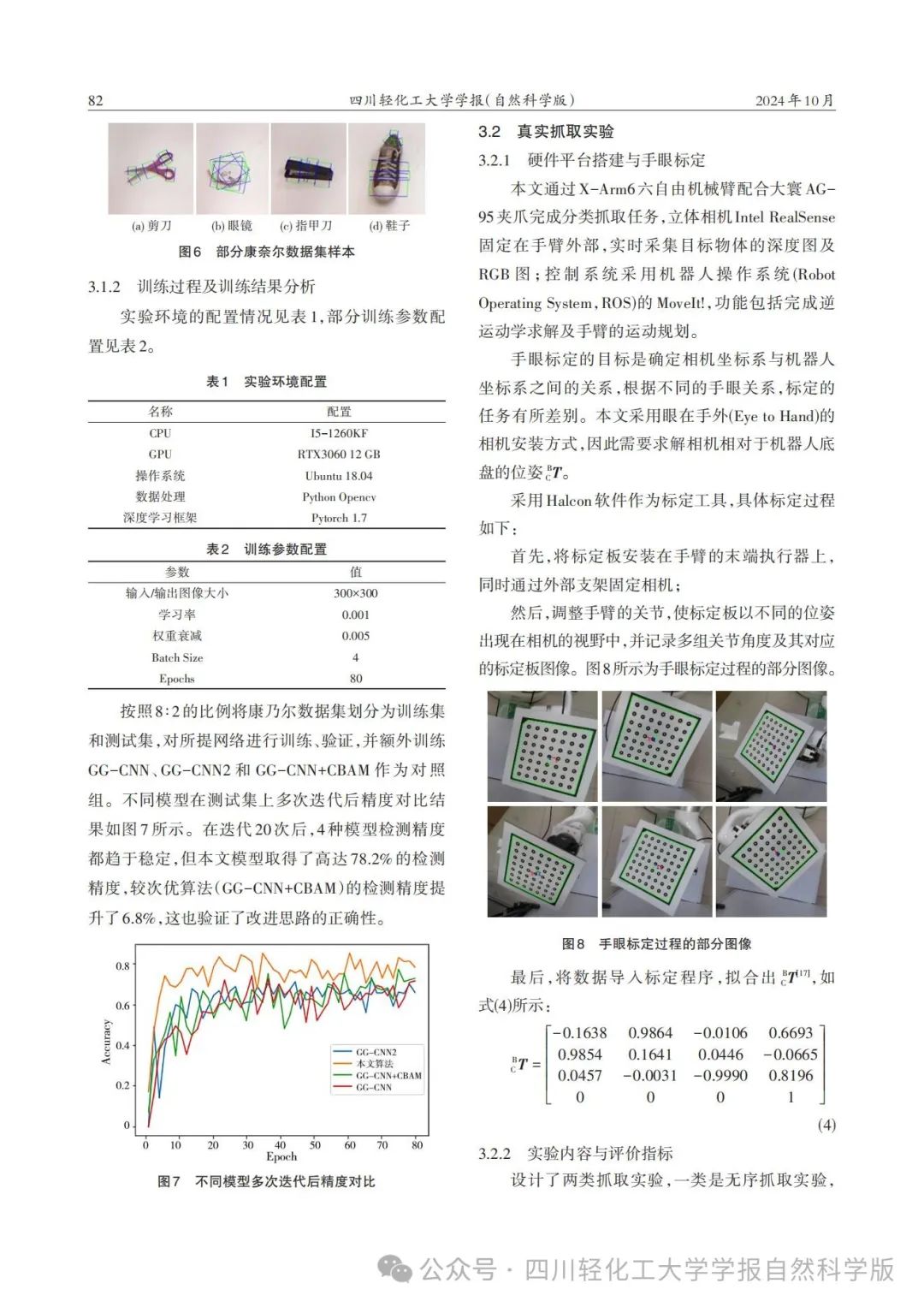
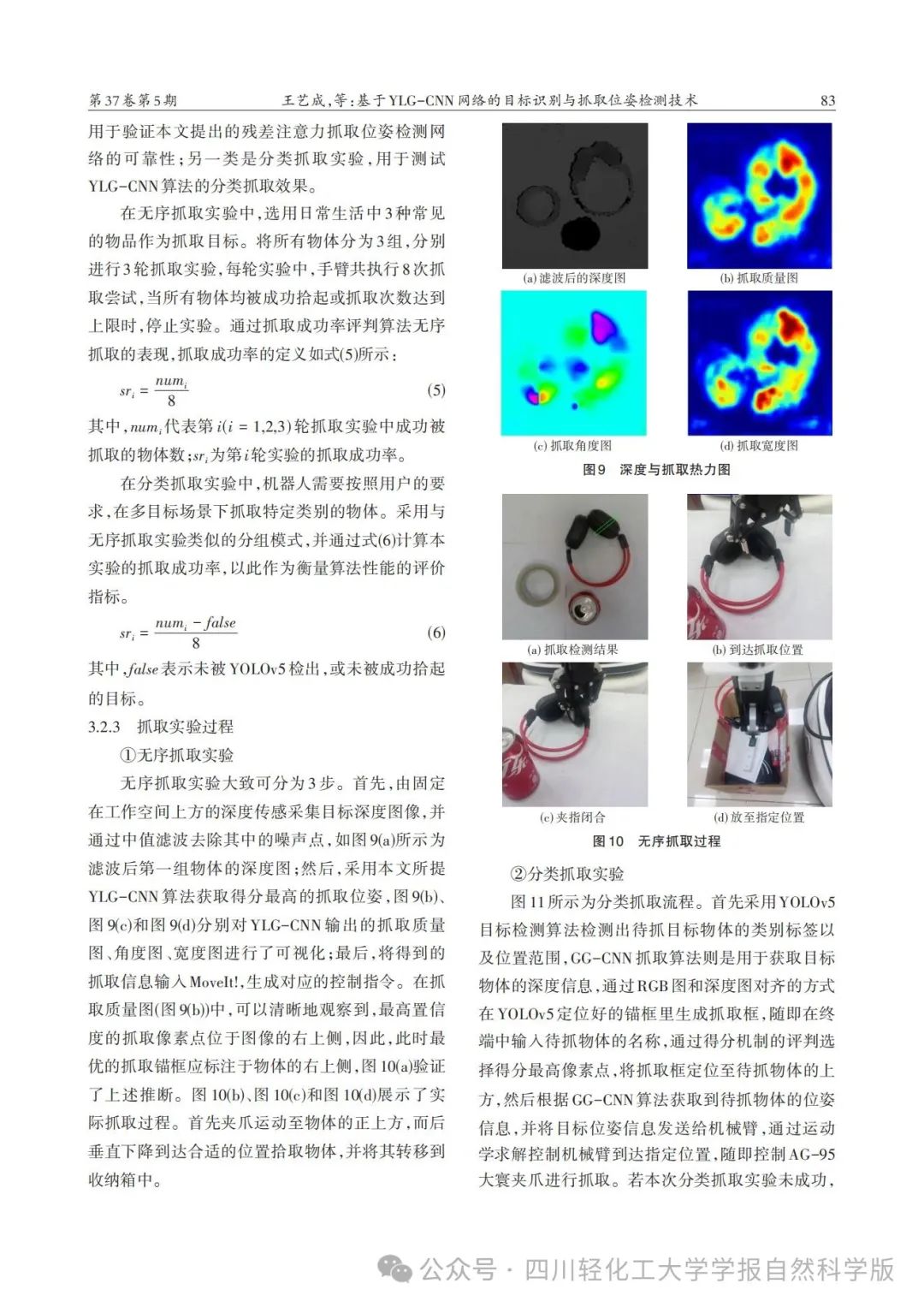
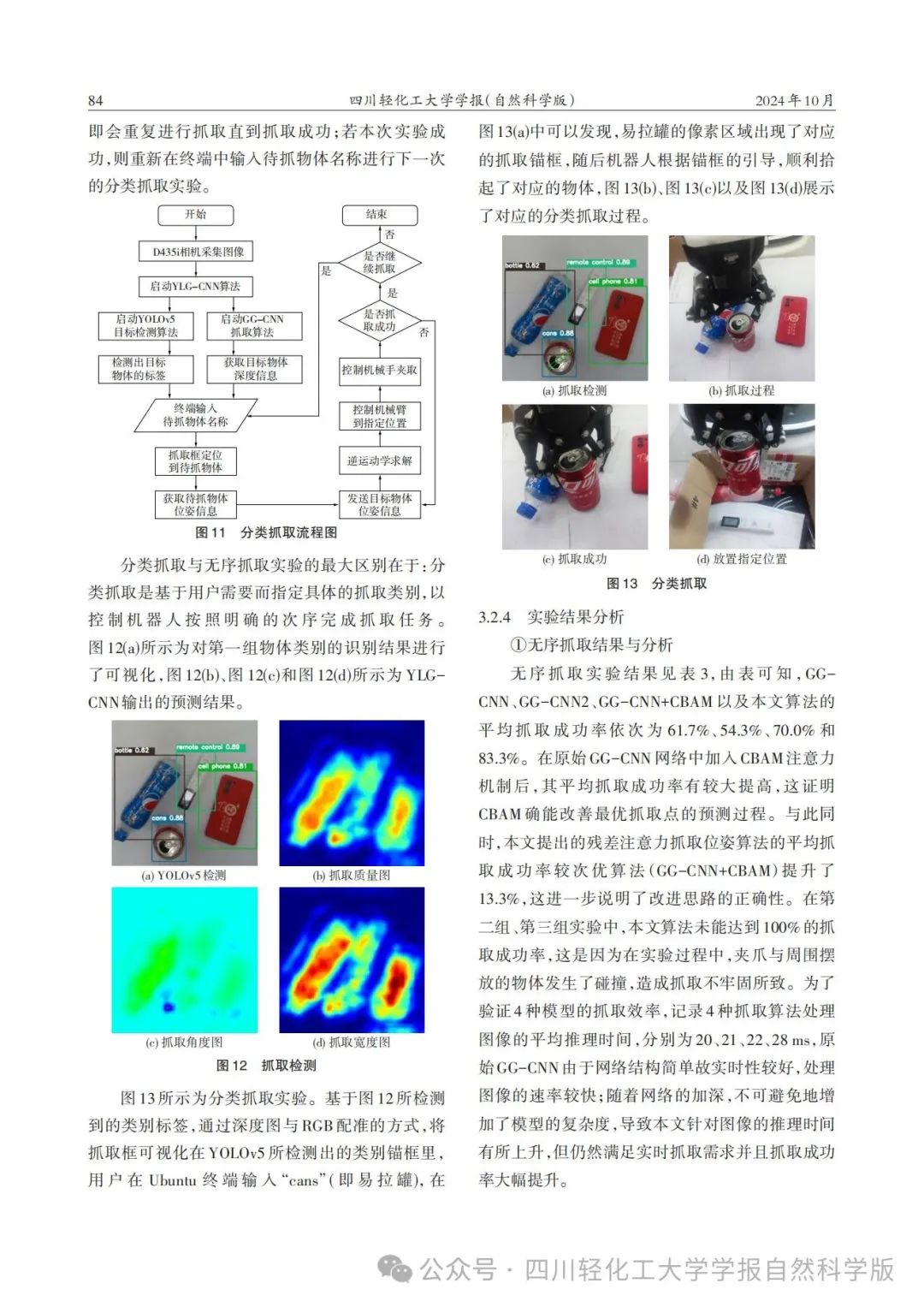
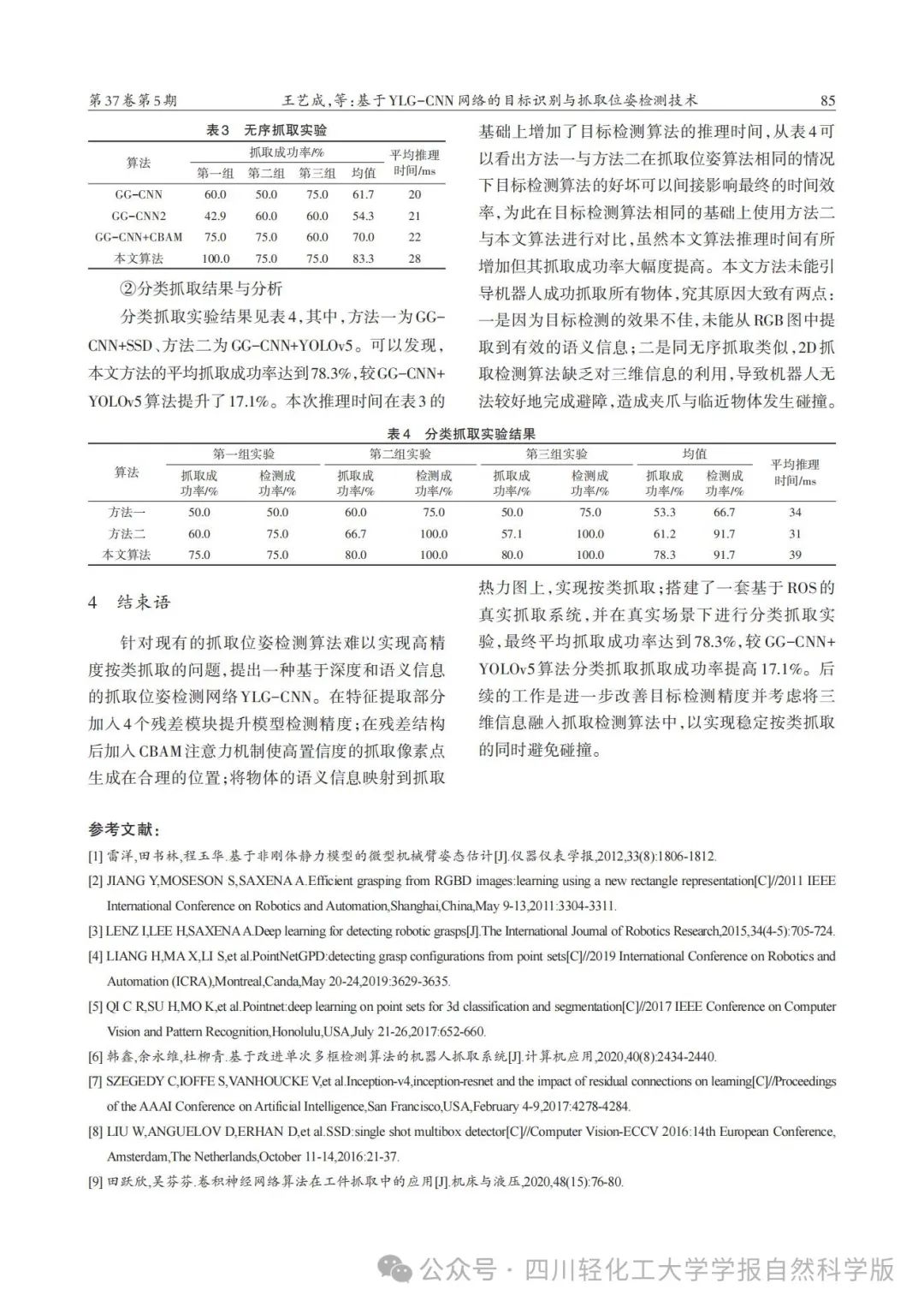
Abstract: In response to the challenge of achieving high-precision class-based grasping with existing grasp pose detection algorithms, we designed a grasp pose detection network based on depth and semantic information, termed YLG-CNN. Firstly, we improved the grasp detection algorithm GG-CNN by adding a residual structure to the feature extraction module, integrating features from different levels to enhance the model’s understanding of depth information. At the end of the residual structure, we introduced the CBAM attention mechanism to ensure that the heat pixels suitable for the grasping center receive higher heat values, resulting in more reliable grasp poses. Secondly, we used the YOLOv5 algorithm to obtain the categories of targets to be grasped and mapped them onto the grasp heat map output by the improved GG-CNN, assigning semantic information of the grasped object to each grasp point, enabling class-based grasping. Finally, we designed a 3D visual intelligent grasping system based on the Robot Operating System (ROS) and validated the proposed method through real grasping experiments. Experimental results show that the proposed residual attention grasping network achieves a grasping accuracy of 78.2%, which is an improvement of 6.8% over the second-best algorithm GGCNN+CBAM, and the YLG-CNN classification grasping network can achieve high-precision classification grasping, with an average grasping success rate of 78.3%, which is an increase of 17.1% compared to the GG-CNN+YOLOv5 algorithm.
Keywords: Object recognition; Grasp pose detection; GG-CNN; Residual network; Class-based grasping
Full Text Preview
Swipe Left and Right to See More
Citation Format
Chinese: Wang Yicheng, Zhang Guoliang, Wang Kun, et al. Target recognition and grasp pose detection technology based on YLG-CNN network[J]. Journal of Sichuan University of Science & Engineering (Natural Science Edition), 2024, 37(5): 78-86.
English: WANG Y C, ZHANG G L, WANG K, et al. Object recognition and grasping pose detection technology based on YLG-CNN network[J]. Journal of Sichuan University of Science & Engineering (Natural Science Edition), 2024, 37(5): 78-86.
DOI
10.11863/j.suse.2024.05.10
Funding Project
Sichuan Provincial Science and Technology Department Key R&D Project (2023YFG0196)
Author Information
Zhang Guoliang (1970-), Male, Professor, PhD, research interests include robotics technology, advanced control theory, and integrated navigation. (E-mail) [email protected]
—If you like it, share it with your friends—
Journal of Sichuan University of Science & Engineering (Natural Science Edition)
WeChat Official Account

Address: 519 Huixing Road, Ziliujing District, Zigong, Sichuan
Postal Code: 643000
Contact Number: (0813) 5505839
Submission Website: https://publish.cnki.net/scqx
This article was originally published in the Journal of Sichuan University of Science & Engineering (Natural Science Edition), 2024, Issue 5, Pages 78-86. To obtain the PDF document, please click “Read the Original”.

Editor: Luo Yunrong
Reviewer: Yu Yongqi
Final Review: Zeng Xianguang