
A brief pc-based hazard prediction training program improves young novice drivers’ hazard perception skills compared to a control group over time
1.Introduction
2.Research Content
3.Research Method
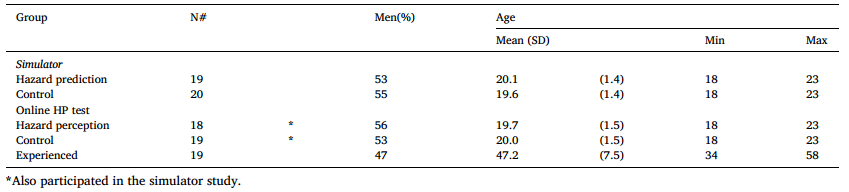
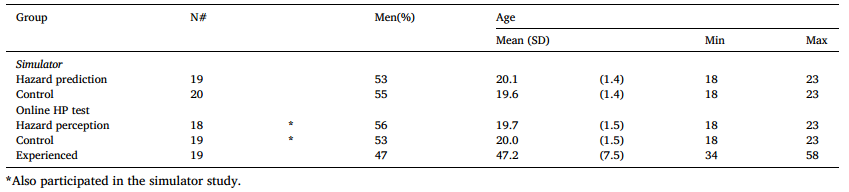
3.1 Experimental Participants
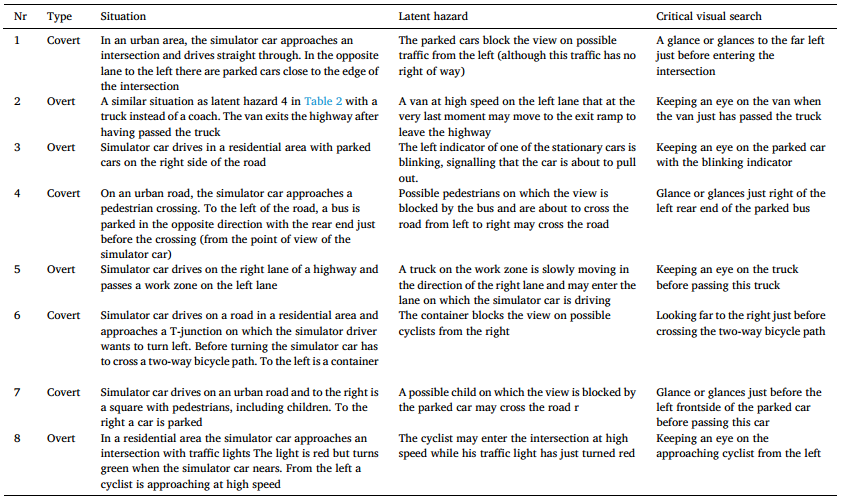
3.2 Experimental Setup and Stimuli

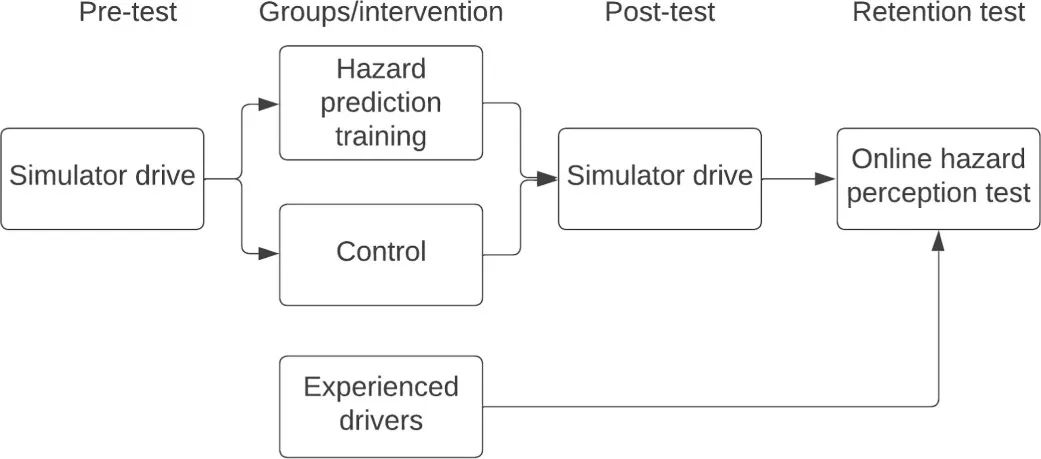
3.3 Experimental Procedure
3.4 Experimental Design and Analysis
4.Research Results
4.1 Driving Simulator Study
4.2 Online Hazard Perception Test

4.3 Gaze at Potential Hazards and Scores on Hazard Perception Tests
5.Conclusion
6.References
7.Review
Knowledge Transporter (Translator) | Zhang Siqing
Reviewed by | Gao Ya
Produced by | Hefei University of Technology, Transportation and Safety Research Institute
Copyright Statement
This article is exclusively written by the “Transportation and Safety Research Institute of Hefei University of Technology”. For reprints,
please indicate the source, thank you!
