
✅ Author Introduction: A Matlab simulation developer passionate about research, improving both skills and technology simultaneously.
For code acquisition, paper reproduction, and research simulation collaboration, feel free tomessage me.
🍎 Personal Homepage: Matlab King Assistant
🍊 Personal Motto: Walk every day, fear not the distance.
🍊 Code acquisition method: QQ: 2307468664
🔥 Content Introduction
The Multi-Agent System (MAS) consists of multiple independent agents that interact and cooperate to achieve common goals. Consensus control in multi-agent systems, as a core research topic in the field of MAS, aims to design control strategies that enable all agents in the system to ultimately reach a consensus state, such as position, velocity, attitude, or a specific state variable. This has significant academic implications in theory and demonstrates enormous potential in practical applications such as drone formations, robotic collaboration, and sensor network synchronization. This article will delve into the theoretical foundations of multi-agent consensus control, the current state of research, and future development directions.
1. Theoretical Foundations of Consensus Control
The mathematical description of the multi-agent consensus control problem is typically based on graph theory and system dynamics. The agents in the system can be represented as nodes in a graph, while interactions between agents can be represented as edges. The topological structure of the graph directly affects the convergence speed and robustness of the consensus algorithm. Common graph theory concepts include connectivity, degree, and algebraic connectivity. The convergence analysis of consensus algorithms usually relies on the spectral properties of the graph and the stability theory of the system, such as Lyapunov stability theory and eigenvalue analysis of the Laplacian matrix.
Common control protocols include distributed control protocols based on neighborhood information and centralized control protocols based on global information. Distributed control protocols utilize local information from agents and their neighbors for control, exhibiting good robustness and scalability, making them more suitable for large-scale multi-agent systems. In contrast, centralized control protocols require global information; although their control performance may be better, they have high computational complexity and are prone to single-point failures.
Based on different control protocols and system models, researchers have proposed various consensus algorithms, such as:
-
First-order and second-order consensus algorithms based on consensus protocols: These algorithms are designed for the first-order dynamic model of agents (e.g., position) and the second-order dynamic model (e.g., position and velocity), adjusting the state of agents based on neighborhood information.
-
Consensus algorithms based on model predictive control: These algorithms utilize model predictive techniques to predict future states and optimize control inputs for better control performance.
-
Consensus algorithms based on adaptive control: These algorithms can adapt to changes in system parameters and external disturbances, improving the robustness of the consensus algorithm.
-
Consensus algorithms based on reinforcement learning: These algorithms utilize reinforcement learning techniques to learn optimal control strategies without prior knowledge of the system model.
2. Current Research Status of Consensus Control
In recent years, significant progress has been made in the research of multi-agent consensus control, focusing mainly on the following areas:
-
The impact of complex network topologies: Researchers are exploring the effects of different network topologies on the convergence speed and robustness of consensus algorithms and designing algorithms with better topological robustness.
-
Design of consensus algorithms under directed graphs: In practical applications, information exchange between agents is often unidirectional, making the study of consensus algorithms under directed graphs significant.
-
Consensus control of nonlinear systems: Many practical systems exhibit nonlinear characteristics, making the study of consensus control for nonlinear systems challenging and an important research direction.
-
Consensus control with disturbances and uncertainties: Real systems inevitably face disturbances and uncertainties, making the design of robust consensus algorithms crucial.
-
Integration of multi-agent consensus with other control objectives: Combining consensus control with other objectives, such as formation control and target tracking, to achieve more complex control tasks.
3. Future Development Directions of Consensus Control
Despite significant progress in multi-agent consensus control, many challenges and opportunities remain:
-
Consensus control of large-scale multi-agent systems: Large-scale multi-agent systems have higher computational complexity and communication burdens, necessitating the design of more efficient and robust algorithms.
-
Consensus control of heterogeneous multi-agent systems: In practical systems, agents often have different dynamic models and control capabilities, requiring consideration of the differences between agents in heterogeneous multi-agent systems.
-
Consensus control in adversarial environments: Ensuring system consensus in the presence of malicious attacks or adversarial disturbances is a significant challenge.
-
Safety and privacy protection: In practical applications, system safety and data privacy protection issues must be considered, necessitating the design of secure and reliable consensus algorithms.
-
Combining theoretical analysis with practical applications: There is a need to strengthen the integration of theoretical analysis and practical applications, applying theoretical results to real engineering problems.
4. Conclusion
Multi-agent consensus control is an active research direction in the MAS field, with significant implications for both theoretical research and practical applications. In the future, with the rapid development of technologies such as artificial intelligence and machine learning, multi-agent consensus control will evolve towards more complex, robust, and secure algorithms, playing an increasingly important role in areas such as unmanned systems, intelligent transportation, and smart cities. Further research needs to focus on the design of robust consensus algorithms under large-scale, heterogeneous, and adversarial environments, integrating practical application scenarios to promote the maturity and application of multi-agent consensus control technology.
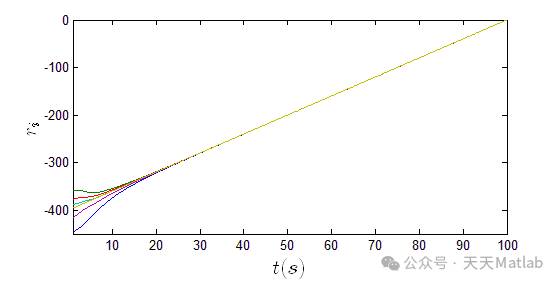
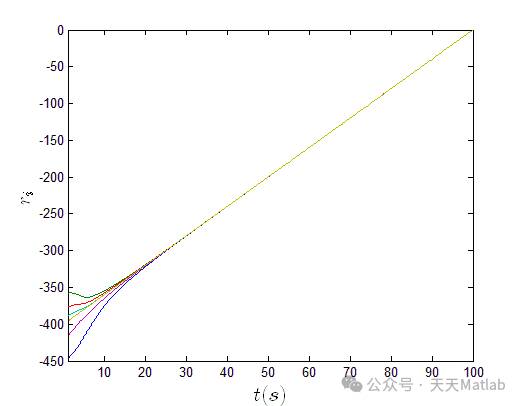
⛳️ Running Results
🔗 References
🎈 Some theoretical references are from online literature. If there is any infringement, please contact the author to delete.
👇 Follow me to receive a wealth of Matlab e-books and mathematical modeling materials.
🎁 Message for complete code and data acquisition, as well as customized simulation for papers and models.
🌿 Past reviews can be found on the homepage, click to search.
🏆 Our team specializes in guiding various research fields in MATLAB simulation, helping realize research dreams:
🌈 Improvements and applications of various intelligent optimization algorithms
Production scheduling, economic scheduling, assembly line scheduling, charging optimization, workshop scheduling, departure optimization, reservoir scheduling, three-dimensional packing, logistics site selection, cargo location optimization, bus scheduling optimization, charging pile layout optimization, workshop layout optimization, container ship loading optimization, pump combination optimization, medical resource allocation optimization, facility layout optimization, visual field base station and drone site selection optimization, knapsack problem, wind farm layout, time slot allocation optimization, optimal distribution of distributed generation units, multi-stage pipeline maintenance, factory-center-demand point three-level site selection problem, emergency supply material distribution center site selection, base station site selection, road lamp post arrangement, hub node deployment, transmission line typhoon monitoring devices, container scheduling, unit optimization, investment portfolio optimization, cloud server combination optimization, antenna linear array distribution optimization, CVRP problem, VRPPD problem, multi-center VRP problem, multi-layer network VRP problem, multi-center multi-vehicle VRP problem, dynamic VRP problem, two-layer vehicle routing planning (2E-VRP), electric vehicle routing planning (EVRP), hybrid vehicle routing planning, mixed flow workshop problem, order splitting scheduling problem, bus scheduling optimization problem, flight shuttle vehicle scheduling problem, site selection routing planning problem, port scheduling, port bridge scheduling, parking space allocation, airport flight scheduling, leak source localization.
🌈 Time series, regression, classification, clustering, and dimensionality reduction in machine learning and deep learning
2.1 BP time series, regression prediction, and classification
2.2 ENS voice neural network time series, regression prediction, and classification
2.3 SVM/CNN-SVM/LSSVM/RVM support vector machine series time series, regression prediction, and classification
2.4 CNN|TCN|GCN convolutional neural network series time series, regression prediction, and classification
2.5 ELM/KELM/RELM/DELM extreme learning machine series time series, regression prediction, and classification
2.6 GRU/Bi-GRU/CNN-GRU/CNN-BiGRU gated neural network time series, regression prediction, and classification
2.7 Elman recurrent neural network time series, regression prediction, and classification
2.8 LSTM/BiLSTM/CNN-LSTM/CNN-BiLSTM long short-term memory neural network series time series, regression prediction, and classification
2.9 RBF radial basis neural network time series, regression prediction, and classification
2.10 DBN deep belief network time series, regression prediction, and classification
2.11 FNN fuzzy neural network time series, regression prediction
2.12 RF random forest time series, regression prediction, and classification
2.13 BLS broad learning system time series, regression prediction, and classification
2.14 PNN pulse neural network classification
2.15 Fuzzy wavelet neural network prediction and classification
2.16 Time series, regression prediction, and classification
2.17 Time series, regression prediction, and classification
2.18 XGBOOST ensemble learning time series, regression prediction, and classification
2.19 Transform various combinations time series, regression prediction, and classification
Directions cover wind power prediction, photovoltaic prediction, battery life prediction, radiation source identification, traffic flow prediction, load forecasting, stock price prediction, PM2.5 concentration prediction, battery health state prediction, electricity consumption prediction, water body optical parameter inversion, NLOS signal identification, precise subway stop prediction, transformer fault diagnosis.
🌈 In image processing
Image recognition, image segmentation, image detection, image hiding, image registration, image stitching, image fusion, image enhancement, image compression sensing.
🌈 In path planning
Traveling salesman problem (TSP), vehicle routing problem (VRP, MVRP, CVRP, VRPTW, etc.), drone three-dimensional path planning, drone collaboration, drone formation, robot path planning, grid map path planning, multimodal transportation problem, electric vehicle routing planning (EVRP), two-layer vehicle routing planning (2E-VRP), hybrid vehicle routing planning, ship trajectory planning, overall path planning, warehouse patrol.
🌈 In drone applications
Drone path planning, drone control, drone formation, drone collaboration, drone task allocation, drone safe communication trajectory online optimization, vehicle collaborative drone path planning.
🌈 In communication
Sensor deployment optimization, communication protocol optimization, routing optimization, target localization optimization, Dv-Hop localization optimization, Leach protocol optimization, WSN coverage optimization, multicast optimization, RSSI localization optimization, underwater communication, communication upload/download allocation.
🌈 In signal processing
Signal recognition, signal encryption, signal denoising, signal enhancement, radar signal processing, signal watermark embedding and extraction, EMG signals, EEG signals, signal timing optimization, ECG signals, DOA estimation, encoding and decoding, variational mode decomposition, pipeline leakage, filters, digital signal processing + transmission + analysis + denoising, digital signal modulation, bit error rate, signal estimation, DTMF, signal detection.
🌈 In power systems
Microgrid optimization, reactive power optimization, distribution network reconstruction, energy storage configuration, orderly charging, MPPT optimization, household electricity.
🌈 In cellular automata
Traffic flow, crowd evacuation, virus spread, crystal growth, metal corrosion.
🌈 In radar
Kalman filter tracking, trajectory association, trajectory fusion, SOC estimation, array optimization, NLOS identification.
🌈 In workshop scheduling
Zero-wait flow shop scheduling problem NWFSP, permutation flow shop scheduling problem PFSP, hybrid flow shop scheduling problem HFSP, zero idle flow shop scheduling problem NIFSP, distributed permutation flow shop scheduling problem DPFSP, blocking flow shop scheduling problem BFSP.
👇