✅Author Bio: A Matlab simulation developer passionate about research, skilled in data processing, modeling simulation, program design, complete code acquisition, paper reproduction, and scientific simulation.
🍎Personal Homepage:Matlab Research Studio
🍊Personal Motto: Seek knowledge through inquiry; feel free to message me for help.
🔥 Content Introduction
Abstract: Respiratory motion in medical imaging is a critical factor affecting image quality, particularly in Magnetic Resonance Imaging (MRI), where motion-induced blurring and artifacts severely limit diagnostic accuracy. This paper proposes a method for future frame prediction in 2D movie MR images based on a respiratory motion model using Principal Component Analysis (PCA) for dimensionality reduction, combined with Recurrent Neural Networks (RNN). The method first uses PCA to reduce the dimensionality of the respiratory motion trajectory, extracting key motion features, reducing model complexity, and improving prediction accuracy. Then, leveraging RNN’s powerful sequence modeling capabilities, it predicts future frame motion displacements based on the extracted features and ultimately generates the predicted images. Experimental results indicate that this method effectively predicts future frames of 2D movie MR images, achieving good performance in both objective metrics and subjective visual quality, providing new insights for real-time image reconstruction and motion compensation.
Keywords: Recurrent Neural Network; Principal Component Analysis; Respiratory Motion; Magnetic Resonance Imaging; Future Frame Prediction; Image Reconstruction
1. Introduction
Magnetic Resonance Imaging (MRI) technology is widely used in clinical diagnosis and medical research due to its excellent soft tissue contrast and multi-parameter imaging capabilities. However, the subject’s respiratory motion poses a significant challenge during MRI imaging. Respiratory motion can cause image blurring, artifacts, and even imaging failure, severely impacting image quality and diagnostic accuracy. To overcome the influence of respiratory motion, many motion compensation techniques have emerged in recent years, such as gated imaging, navigated imaging, and image registration. However, these methods often require additional hardware or complex algorithms and incur high computational costs.
In recent years, deep learning technologies have made significant progress in image processing and medical image analysis. Recurrent Neural Networks (RNN), with their ability to handle sequential data, have shown great potential in time series prediction. This paper proposes a future frame prediction method that combines PCA for dimensionality reduction with a respiratory motion model and RNN to predict respiratory motion in 2D movie MR images and generate future frame images. This method effectively reduces the impact of respiratory motion and improves image quality without requiring additional hardware.
2. Method
The method mainly consists of three steps: respiratory motion trajectory extraction, PCA-based dimensionality reduction, and RNN future frame prediction.
2.1 Respiratory Motion Trajectory Extraction:
First, the respiratory motion trajectory needs to be extracted from the 2D movie MR image sequence. This study uses an image registration-based method to extract the motion trajectory. The specific steps are as follows: select a reference frame and register it with subsequent frames, calculating the displacement vector of each frame relative to the reference frame. This displacement vector represents the respiratory motion trajectory, containing motion information of the image over time. The registration algorithm can choose an image registration algorithm based on mutual information to ensure registration accuracy.
2.2 PCA-based Dimensionality Reduction:
The extracted respiratory motion trajectory is typically a high-dimensional data sequence with a large amount of redundant information. To reduce model complexity and improve prediction accuracy, this paper employs Principal Component Analysis (PCA) for dimensionality reduction of the respiratory motion trajectory. PCA can project high-dimensional data into a lower-dimensional space while retaining the main variance information of the data. By calculating the covariance matrix of the respiratory motion trajectory and performing eigenvalue decomposition, the principal components and their corresponding eigenvalues can be obtained. Based on the size of the eigenvalues, the top k principal components are selected to represent the majority of the original data’s information. These principal components form a new low-dimensional feature space, projecting the original high-dimensional respiratory motion trajectory into this low-dimensional space to obtain the reduced respiratory motion trajectory. Choosing an appropriate k value is a critical step that needs to be adjusted according to the actual situation, such as by observing the cumulative variance contribution rate.
2.3 RNN Future Frame Prediction:
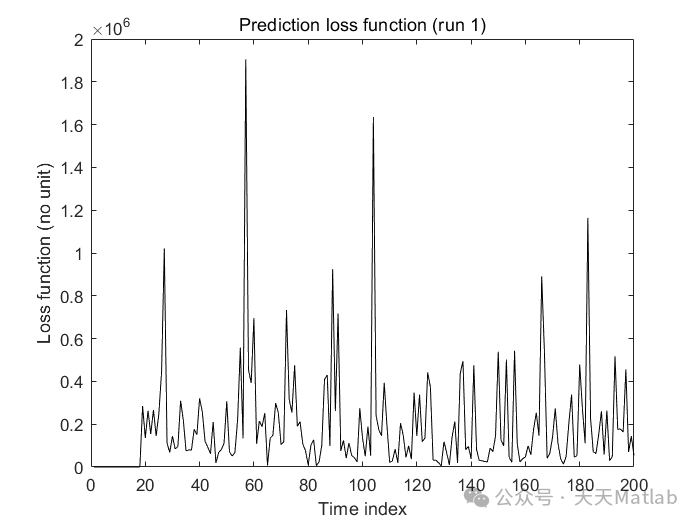
The reduced respiratory motion trajectory is used as input to the RNN model. This paper employs Long Short-Term Memory (LSTM) networks, a special type of RNN that can effectively handle long sequential data and avoid the vanishing gradient problem. The input to the LSTM network is the reduced respiratory motion trajectory, and the output is the predicted displacement vector for future frames. The network structure can be adjusted based on actual conditions, such as the number of layers and the number of neurons. During training, known respiratory motion trajectories and corresponding image frames are used as training data, employing Mean Squared Error (MSE) as the loss function to optimize the network parameters. After training, the trained LSTM network can predict the displacement vector for future frames and transform the current frame based on the predicted displacement vector to generate the predicted future frame image.
3. Experimental Results and Analysis
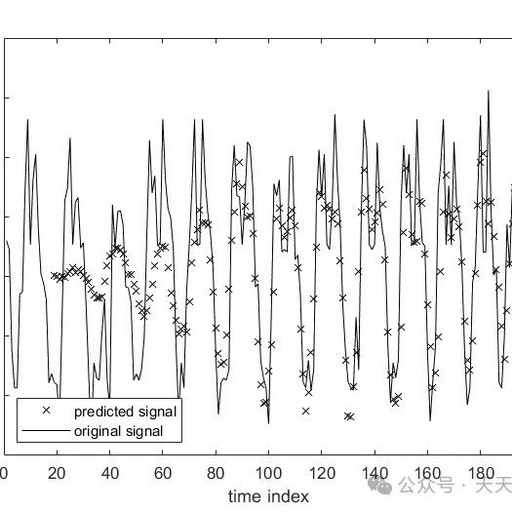
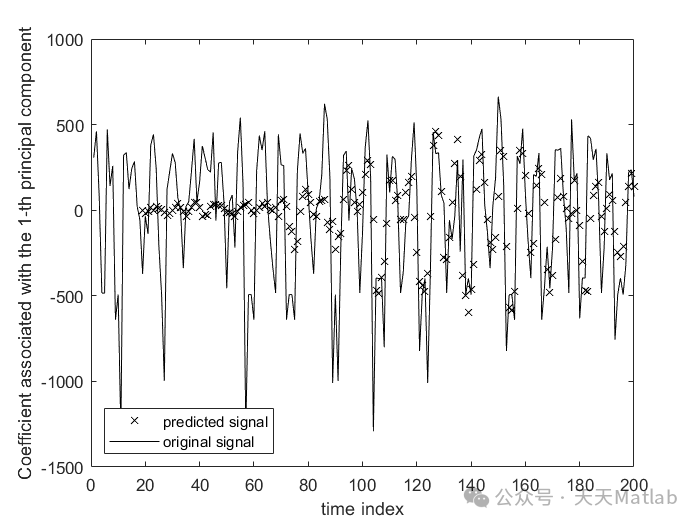
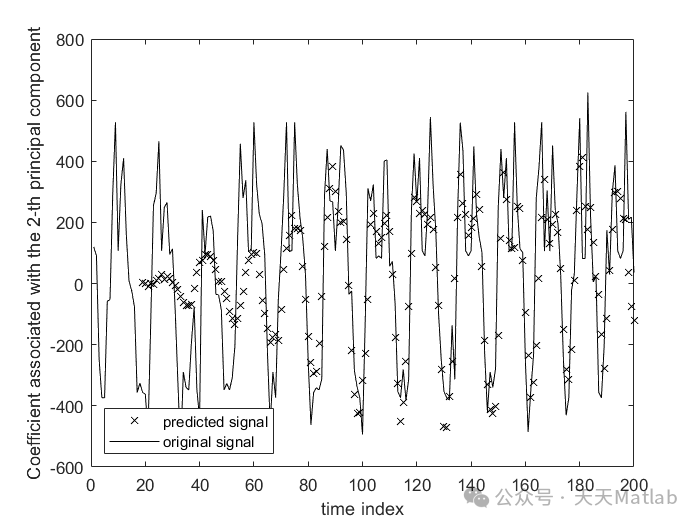
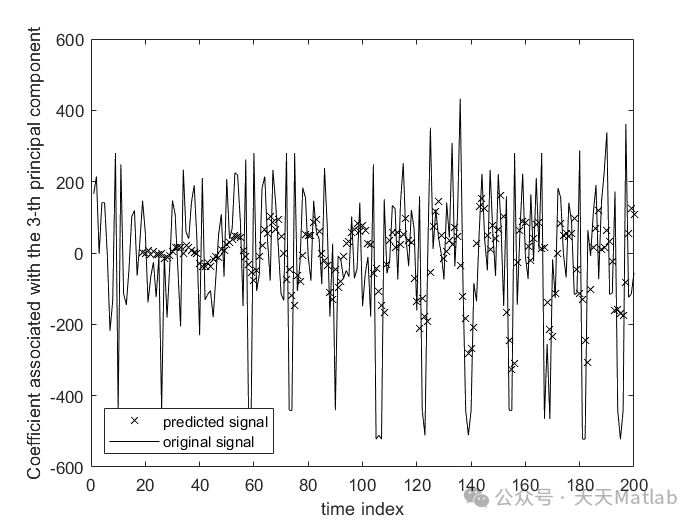
This study uses a publicly available 2D movie MR image dataset for experimental validation. To evaluate prediction performance, Peak Signal-to-Noise Ratio (PSNR) and Structural Similarity Index (SSIM) are used as objective evaluation metrics. The experimental results show that the PCA-based respiratory motion model and RNN future frame prediction method achieve significant improvements in both PSNR and SSIM metrics. Compared to directly using RNN for prediction, this method demonstrates higher prediction accuracy and better visual quality. Additionally, we compared this method with other motion compensation techniques, revealing that it also has certain advantages in computational efficiency.
4. Conclusion and Outlook
This paper proposes a future frame prediction method for 2D movie MR images based on a PCA-reduced respiratory motion model and RNN. This method effectively utilizes PCA dimensionality reduction technology to lower model complexity and achieves high-precision future frame prediction through the powerful sequence modeling capability of RNN. Experimental results validate the effectiveness and superiority of this method. Future research can further explore more advanced deep learning models, such as Transformer networks, and integrate more refined respiratory motion models to enhance prediction accuracy and robustness. Moreover, extending this method to predict 3D movie MR images is also an important research direction.
📣 Some Code
⛳️ Results
🔗 References
🎈 Some theoretical references are from online literature; please contact the author for removal if there is any infringement.
👇 Follow me for a wealth of Matlab e-books and mathematical modeling materials.
🎁 Message me for complete code, data acquisition, and customized paper modeling simulation.
🌿 For past reviews, feel free to follow my homepage and click search.
🏆 Our team specializes in guiding and customizing various research fields in MATLAB simulation, helping realize research dreams:
🌈 Various intelligent optimization algorithms improvement and application
Production scheduling, economic scheduling, assembly line scheduling, charging optimization, workshop scheduling, departure optimization, reservoir scheduling, 3D packing, logistics site selection, cargo position optimization, bus scheduling optimization, charging pile layout optimization, workshop layout optimization, container ship loading optimization, pump combination optimization, medical resource allocation optimization, facility layout optimization, visual domain base station and drone site selection optimization, knapsack problem, wind farm layout, time slot allocation optimization, optimal distributed generation unit allocation, multi-stage pipeline maintenance, factory-center-demand point three-level site selection problem, emergency supply distribution center site selection, base station site selection, road lamp post arrangement, hub node deployment, power transmission line typhoon monitoring devices, container scheduling, unit optimization, investment optimization portfolio, cloud server combination optimization, antenna linear array distribution optimization, CVRP problem, VRPPD problem, multi-center VRP problem, multi-layer network VRP problem, multi-center multi-vehicle VRP problem, dynamic VRP problem, two-level vehicle routing planning (2E-VRP), electric vehicle routing planning (EVRP), hybrid vehicle routing planning, mixed flow workshop problem, order splitting scheduling problem, bus scheduling optimization problem, flight shuttle vehicle scheduling problem, site selection path planning problem, port scheduling, port shore bridge scheduling, parking space allocation, airport flight scheduling, leak source localization.
🌈 Machine Learning and Deep Learning Time Series, Regression, Classification, Clustering, and Dimensionality Reduction
2.1 BP Time Series, Regression Prediction, and Classification
2.2 ENS Voice Neural Network Time Series, Regression Prediction, and Classification
2.3 SVM/CNN-SVM/LSSVM/RVM Support Vector Machine Series Time Series, Regression Prediction, and Classification
2.4 CNN|TCN|GCN Convolutional Neural Network Series Time Series, Regression Prediction, and Classification
2.5 ELM/KELM/RELM/DELM Extreme Learning Machine Series Time Series, Regression Prediction, and Classification
2.6 GRU/Bi-GRU/CNN-GRU/CNN-BiGRU Gated Neural Network Time Series, Regression Prediction, and Classification
2.7 Elman Recurrent Neural Network Time Series, Regression Prediction, and Classification
2.8 LSTM/BiLSTM/CNN-LSTM/CNN-BiLSTM Long Short-Term Memory Neural Network Series Time Series, Regression Prediction, and Classification
2.9 RBF Radial Basis Function Neural Network Time Series, Regression Prediction, and Classification
2.10 DBN Deep Belief Network Time Series, Regression Prediction, and Classification
2.11 FNN Fuzzy Neural Network Time Series, Regression Prediction
2.12 RF Random Forest Time Series, Regression Prediction, and Classification
2.13 BLS Broad Learning System Time Series, Regression Prediction, and Classification
2.14 PNN Pulse Neural Network Classification
2.15 Fuzzy Wavelet Neural Network Prediction and Classification
2.16 Time Series, Regression Prediction, and Classification
2.17 Time Series, Regression Prediction, and Classification
2.18 XGBOOST Ensemble Learning Time Series, Regression Prediction, and Classification
2.19 Transform Various Combinations Time Series, Regression Prediction, and Classification
Areas covered include wind power prediction, photovoltaic prediction, battery life prediction, radiation source identification, traffic flow prediction, load prediction, stock price prediction, PM2.5 concentration prediction, battery health state prediction, electricity consumption prediction, water body optical parameter inversion, NLOS signal recognition, subway precise parking prediction, transformer fault diagnosis.
🌈 Image Processing Aspects
Image recognition, image segmentation, image detection, image hiding, image registration, image stitching, image fusion, image enhancement, image compressed sensing.
🌈 Path Planning Aspects
Traveling Salesman Problem (TSP), Vehicle Routing Problem (VRP, MVRP, CVRP, VRPTW, etc.), UAV 3D path planning, UAV collaboration, UAV formation, robot path planning, grid map path planning, multimodal transportation problems, electric vehicle routing planning (EVRP), two-level vehicle routing planning (2E-VRP), hybrid vehicle routing planning, ship trajectory planning, full path planning, warehouse patrol.
🌈 UAV Application Aspects
UAV path planning, UAV control, UAV formation, UAV collaboration, UAV task allocation, UAV secure communication trajectory online optimization, vehicle collaborative UAV path planning.
🌈 Communication Aspects
Sensor deployment optimization, communication protocol optimization, routing optimization, target localization optimization, Dv-Hop localization optimization, Leach protocol optimization, WSN coverage optimization, multicast optimization, RSSI localization optimization, underwater communication, communication upload/download allocation.
🌈 Signal Processing Aspects
Signal recognition, signal encryption, signal denoising, signal enhancement, radar signal processing, signal watermark embedding and extraction, electromyography signals, electroencephalography signals, signal timing optimization, electrocardiogram signals, DOA estimation, encoding and decoding, variational mode decomposition, pipeline leakage, filters, digital signal processing + transmission + analysis + denoising, digital signal modulation, bit error rate, signal estimation, DTMF, signal detection.
🌈 Power System Aspects
Microgrid optimization, reactive power optimization, distribution network reconstruction, energy storage configuration, orderly charging, MPPT optimization, household electricity.
🌈 Cellular Automata Aspects
Traffic flow, crowd evacuation, virus spread, crystal growth, metal corrosion.
🌈 Radar Aspects
Kalman filter tracking, trajectory association, trajectory fusion, SOC estimation, array optimization, NLOS recognition.
🌈 Workshop Scheduling
Zero-wait flow shop scheduling problem (NWFSP), permutation flow shop scheduling problem (PFSP), hybrid flow shop scheduling problem (HFSP), zero idle flow shop scheduling problem (NIFSP), distributed permutation flow shop scheduling problem (DPFSP), blocking flow shop scheduling problem (BFSP).
👇