01
Introduction
This article reviews some of the more ingeniously designed and practical “plugins” used in CNN networks. The so-called “plugins” are modules that do not alter the main structure of the network and can be easily integrated into mainstream networks to enhance their feature extraction capabilities, achieving a plug-and-play functionality. Many similar reviews claim to offer plug-and-play solutions, but based on my experience and research, I have found that many plugins are impractical, non-generalizable, or even ineffective, which led to this article.
First, my understanding is: since they are “plugins,” they should be enhancements that are easy to implant and effectively usable, truly plug-and-play. The “plugins” listed in this article can be seen in many SOTA networks. These are conscientious “plugins” worth promoting, truly capable of plug-and-play functionality. In short, they are “plugins” that actually work. Many of these “plugins” have been developed to enhance CNN capabilities, such as translation, rotation, scale invariance, multi-scale feature extraction, receptive field enhancement, and spatial position awareness.
Nominees: STN, ASPP, Non-local, SE, CBAM, DCNv1&v2, CoordConv, Ghost, BlurPool, RFB, ASFF
02
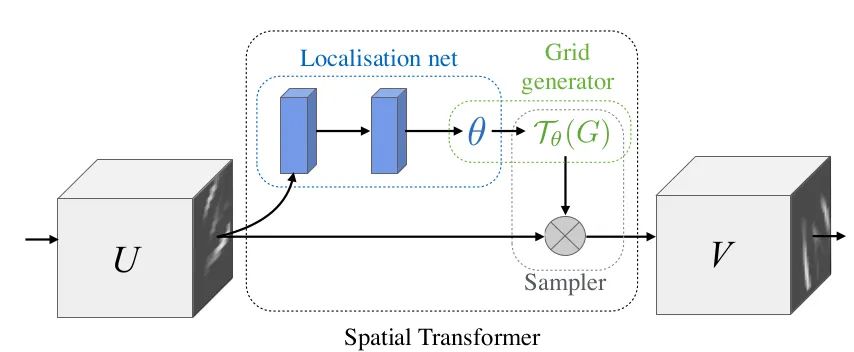
STN
Source Paper: Spatial Transformer Networks
Paper Link: https://arxiv.org/pdf/1506.02025.pdf
Core Analysis:
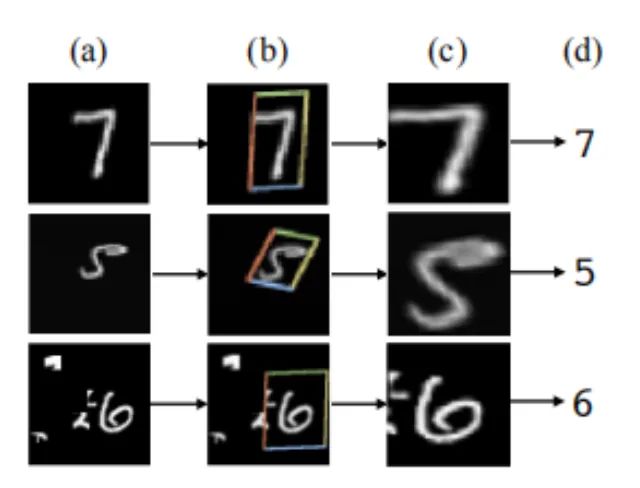
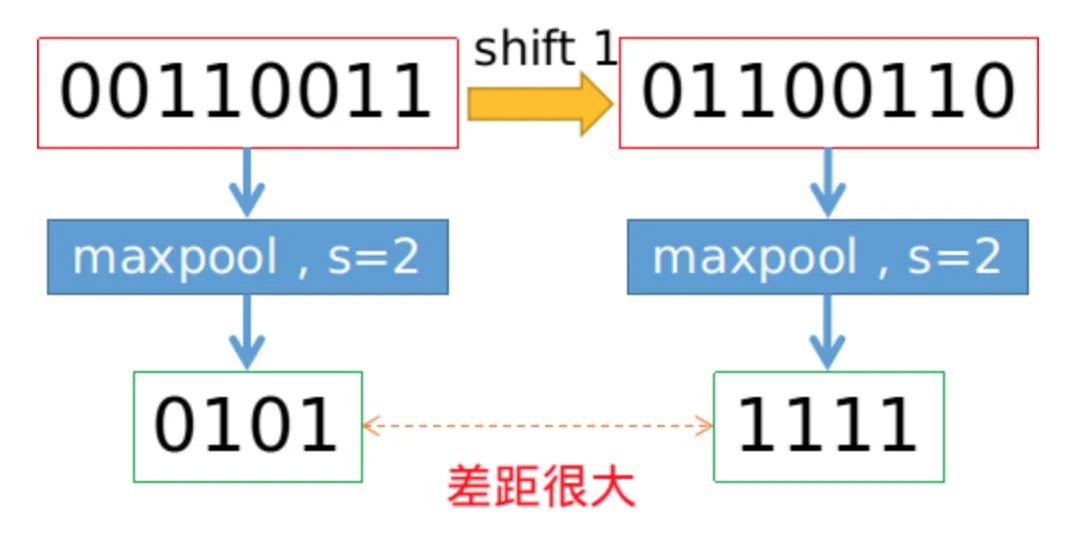
In tasks like OCR, you will often see its presence. For CNN networks, we hope they exhibit a certain invariance to object pose, location, etc. This means they should adapt to variations in pose and location in the test set. Invariance or equivariance can effectively enhance the model’s generalization ability. Although CNNs use sliding-window convolution operations, which provide some degree of translational invariance, many studies have found that downsampling can destroy this invariance. Thus, it can be concluded that the network’s invariance capability is very weak, let alone invariance to rotation, scale, and illumination. Generally, we use data augmentation to achieve network “invariance”.
class SpatialTransformer(nn.Module):def __init__(self, spatial_dims):super(SpatialTransformer, self).__init__()self._h, self._w = spatial_dims self.fc1 = nn.Linear(32*4*4, 1024) # Set according to your network parametersself.fc2 = nn.Linear(1024, 6)def forward(self, x): batch_images = x # Save a copy of the original data x = x.view(-1, 32*4*4) # Learn the 6 parameters using FC structure x = self.fc1(x) x = self.fc2(x) x = x.view(-1, 2,3) # 2x3 # Generate sampling points using affine_grid affine_grid_points = F.affine_grid(x, torch.Size((x.size(0), self._in_ch, self._h, self._w))) # Apply sampling points to the original data rois = F.grid_sample(batch_images, affine_grid_points)return rois, affine_grid_points03
ASPP
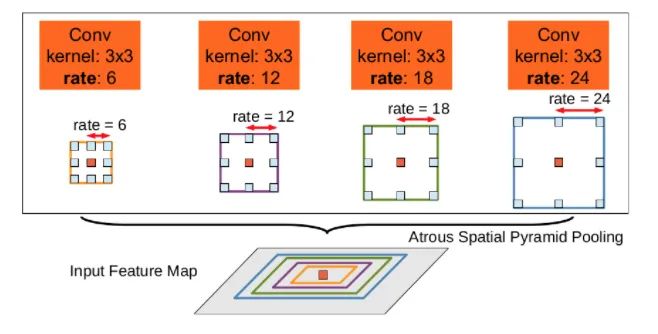
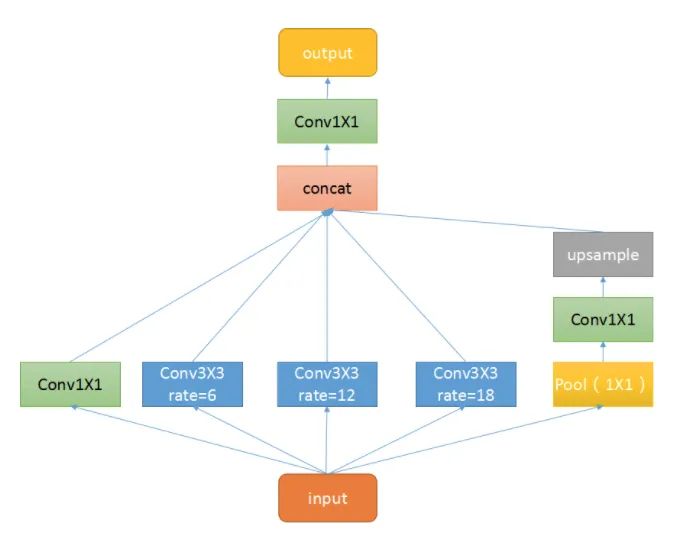
class ASPP(nn.Module):def __init__(self, in_channel=512, depth=256):super(ASPP,self).__init__()self.mean = nn.AdaptiveAvgPool2d((1, 1))self.conv = nn.Conv2d(in_channel, depth, 1, 1)self.atrous_block1 = nn.Conv2d(in_channel, depth, 1, 1) # Convolutions with different dilation ratesself.atrous_block6 = nn.Conv2d(in_channel, depth, 3, 1, padding=6, dilation=6)self.atrous_block12 = nn.Conv2d(in_channel, depth, 3, 1, padding=12, dilation=12)self.atrous_block18 = nn.Conv2d(in_channel, depth, 3, 1, padding=18, dilation=18)self.conv_1x1_output = nn.Conv2d(depth * 5, depth, 1, 1)def forward(self, x): size = x.shape[2:] # Pooling branch image_features = self.mean(x) image_features = self.conv(image_features) image_features = F.upsample(image_features, size=size, mode='bilinear') # Convolutions with different dilation rates atrous_block1 = self.atrous_block1(x) atrous_block6 = self.atrous_block6(x) atrous_block12 = self.atrous_block12(x) atrous_block18 = self.atrous_block18(x) # Merge features from all scales x = torch.cat([image_features, atrous_block1, atrous_block6, atrous_block12, atrous_block18], dim=1) # Use 1x1 convolution to fuse features for output x = self.conv_1x1_output(x)return net04
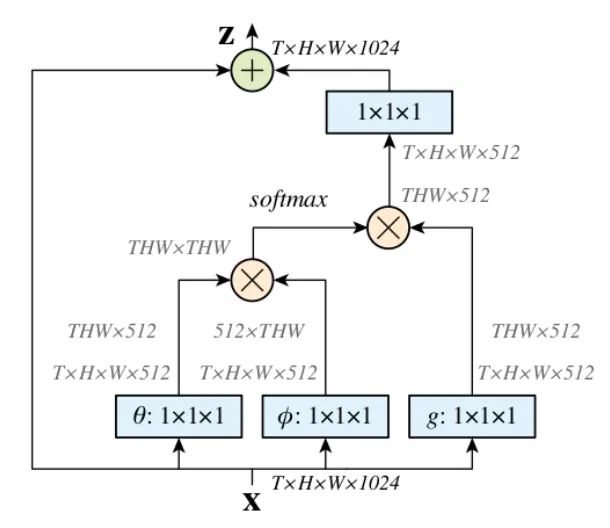
Non-local
-
First, apply a 1×1 convolution to the input feature map to compress the channel number, obtaining, features. -
Then, reshape the three features and perform matrix multiplication to obtain a covariance-like matrix. This step calculates the self-correlation in the features, i.e., the relationship of each pixel in each frame to every other pixel across all frames. -
Next, apply a Softmax operation to the self-correlation features to obtain weights ranging from 0 to 1; these are the self-attention coefficients we need. -
Finally, multiply the attention coefficients back onto the feature matrix g and add the residual from the original input feature map X for the output.
g = torch.tensor([[1, 2], [3, 4]]).view(-1, 1).float()theta = torch.tensor([2, 4, 6, 8]).view(-1, 1)phi = torch.tensor([7, 5, 3, 1]).view(1, -1)tensor([[14., 10., 6., 2.],[28., 20., 12., 4.],[42., 30., 18., 6.],[56., 40., 24., 8.]])tensor([[9.8168e-01, 1.7980e-02, 3.2932e-04, 6.0317e-06],[9.9966e-01, 3.3535e-04, 1.1250e-07, 3.7739e-11],[9.9999e-01, 6.1442e-06, 3.7751e-11, 2.3195e-16],[1.0000e+00, 1.1254e-07, 1.2664e-14, 1.4252e-21]])tensor([[1.0187, 1.0003],[1.0000, 1.0000]])class NonLocal(nn.Module): def __init__(self, channel):super(NonLocalBlock, self).__init__()self.inter_channel = channel // 2self.conv_phi = nn.Conv2d(channel, self.inter_channel, 1, 1,0, False)self.conv_theta = nn.Conv2d(channel, self.inter_channel, 1, 1,0, False)self.conv_g = nn.Conv2d(channel, self.inter_channel, 1, 1, 0, False)self.softmax = nn.Softmax(dim=1)self.conv_mask = nn.Conv2d(self.inter_channel, channel, 1, 1, 0, False)def forward(self, x):# [N, C, H , W] b, c, h, w = x.size()# Get phi features, dimension [N, C/2, H * W] x_phi = self.conv_phi(x).view(b, c, -1)# Get theta features, dimension [N, H * W, C/2] x_theta = self.conv_theta(x).view(b, c, -1).permute(0, 2, 1).contiguous()# Get g features, dimension [N, H * W, C/2] x_g = self.conv_g(x).view(b, c, -1).permute(0, 2, 1).contiguous()# Matrix multiplication of phi and theta, [N, H * W, H * W] mul_theta_phi = torch.matmul(x_theta, x_phi)# Apply softmax to bring values between 0 and 1 mul_theta_phi = self.softmax(mul_theta_phi)# Matrix multiplication with g features, [N, H * W, C/2] mul_theta_phi_g = torch.matmul(mul_theta_phi, x_g)# [N, C/2, H, W] mul_theta_phi_g = mul_theta_phi_g.permute(0, 2, 1).contiguous().view(b, self.inter_channel, h, w)# 1x1 convolution to expand channel numbers mask = self.conv_mask(mul_theta_phi_g)out = mask + x # Residual connectionreturn out05
SE
-
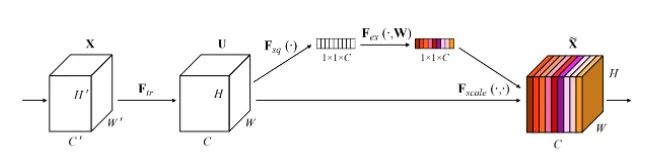
Squeeze: Compress features along the spatial dimension, reducing each 2D feature channel to a single value, which has a global receptive field. -
Excitation: Each feature channel generates a weight representing the importance of that feature channel. -
Reweight: The weights output from Excitation are treated as the importance of each feature channel and are applied multiplicatively to each channel.
class SE_Block(nn.Module):def __init__(self, ch_in, reduction=16): super(SE_Block, self).__init__() self.avg_pool = nn.AdaptiveAvgPool2d(1) # Global adaptive pooling self.fc = nn.Sequential( nn.Linear(ch_in, ch_in // reduction, bias=False), nn.ReLU(inplace=True), nn.Linear(ch_in // reduction, ch_in, bias=False), nn.Sigmoid() )def forward(self, x): b, c, _, _ = x.size() y = self.avg_pool(x).view(b, c) # squeeze operation y = self.fc(y).view(b, c, 1, 1) # FC to obtain channel attention weights, which contain global informationreturn x * y.expand_as(x) # Apply attention to each channel06
CBAM
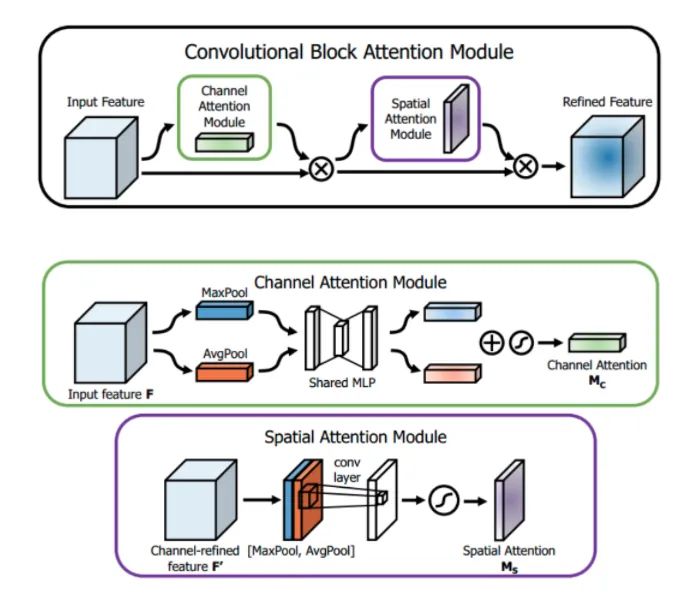
def forward(self, x):# Obtain global information using FC and perform matrix multiplication similar to Non-local avg_out = self.fc2(self.relu1(self.fc1(self.avg_pool(x)))) max_out = self.fc2(self.relu1(self.fc1(self.max_pool(x)))) out = avg_out + max_outreturn self.sigmoid(out)def forward(self, x):# Here we obtain global information using pooling avg_out = torch.mean(x, dim=1, keepdim=True) max_out, _ = torch.max(x, dim=1, keepdim=True) x = torch.cat([avg_out, max_out], dim=1) x = self.conv1(x)return self.sigmoid(x)07
DCN v1&v2
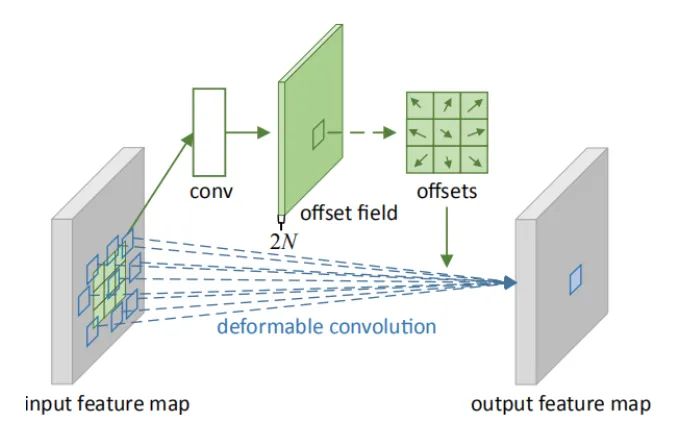
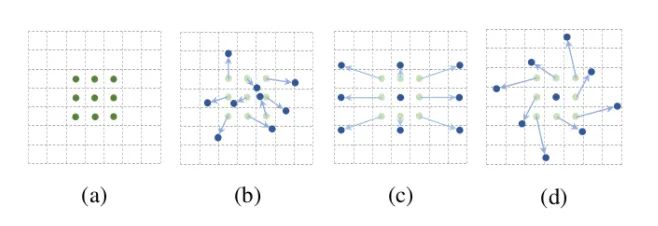
def forward(self, x):# Learn offsets, including x and y directions, note that each pixel in each channel has an x and y offset offset = self.p_conv(x)if self.v2: # When V2, an additional weight coefficient is learned, passed through sigmoid to bring it between 0 and 1 m = torch.sigmoid(self.m_conv(x))# Use offsets to interpolate x, obtaining the offset x_offset x_offset = self.interpolate(x,offset)if self.v2: # When V2, apply the weight coefficient to the feature map m = m.contiguous().permute(0, 2, 3, 1) m = m.unsqueeze(dim=1) m = torch.cat([m for _ in range(x_offset.size(1))], dim=1) x_offset *= m out = self.conv(x_offset) # After applying the offset, perform standard convolutionreturn out08
CoordConv
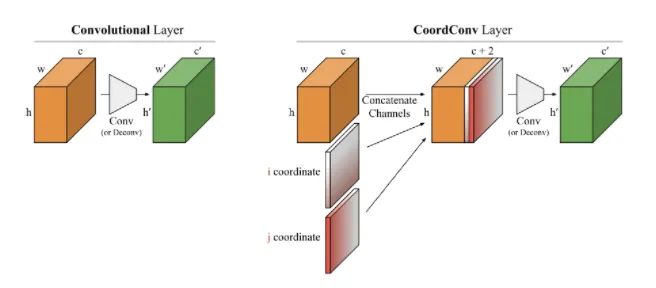
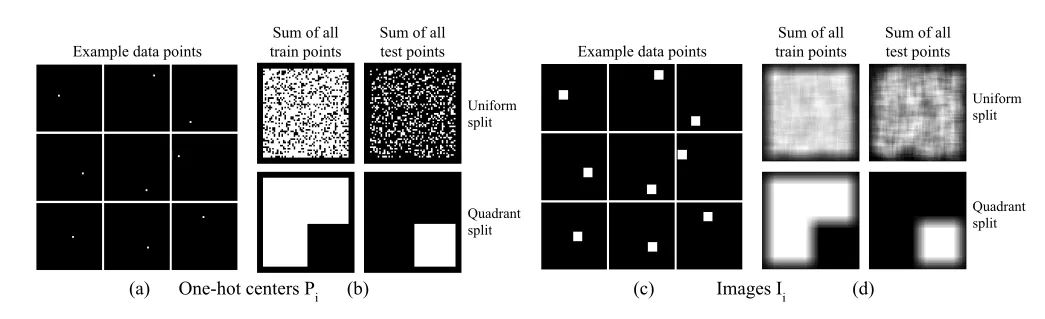
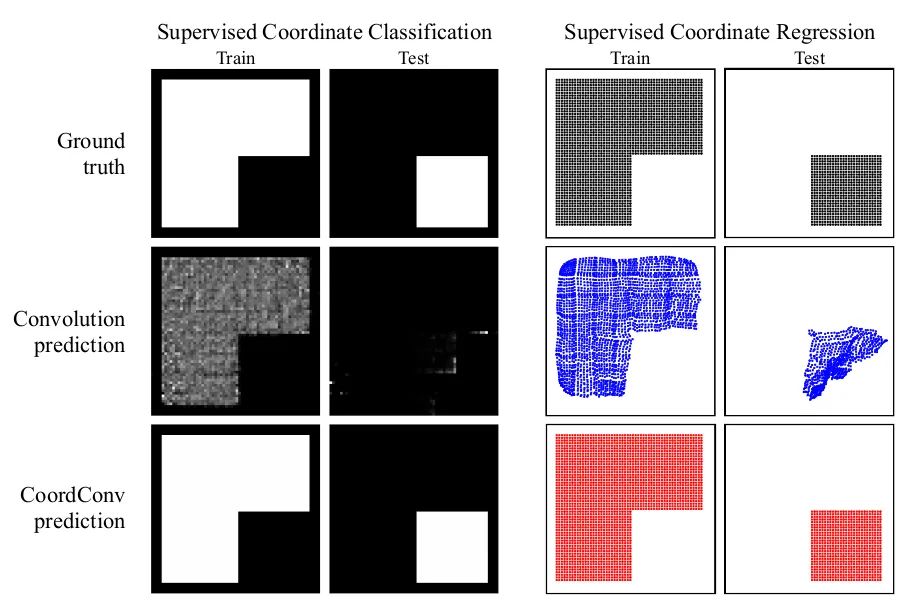
ins_feat = x # Current instance feature tensor# Generate linear values from -1 to 1x_range = torch.linspace(-1, 1, ins_feat.shape[-1], device=ins_feat.device)y_range = torch.linspace(-1, 1, ins_feat.shape[-2], device=ins_feat.device)y, x = torch.meshgrid(y_range, x_range) # Generate 2D coordinate gridy = y.expand([ins_feat.shape[0], 1, -1, -1]) # Expand to match ins_feat dimensionsx = x.expand([ins_feat.shape[0], 1, -1, -1])coord_feat = torch.cat([x, y], 1) # Position featuresins_feat = torch.cat([ins_feat, coord_feat], 1) # Concatenate as input for the next convolution09
Ghost
-
Use fewer convolution operations than normal; for instance, instead of 64 convolution kernels, only use 32, halving the computational load. -
Utilize depthwise separable convolutions to generate redundant features from the features obtained above. -
Concatenate the features obtained from the above two steps for output, sending them to subsequent stages.
class GhostModule(nn.Module): def __init__(self, inp, oup, kernel_size=1, ratio=2, dw_size=3, stride=1, relu=True):super(GhostModule, self).__init__()self.oup = oup init_channels = math.ceil(oup / ratio) new_channels = init_channels*(ratio-1)self.primary_conv = nn.Sequential( nn.Conv2d(inp, init_channels, kernel_size, stride, kernel_size//2, bias=False), nn.BatchNorm2d(init_channels), nn.ReLU(inplace=True) if relu else nn.Sequential(), )# Cheap operations, note the use of grouped convolutions for channel separationself.cheap_operation = nn.Sequential( nn.Conv2d(init_channels, new_channels, dw_size, 1, dw_size//2, groups=init_channels, bias=False), nn.BatchNorm2d(new_channels), nn.ReLU(inplace=True) if relu else nn.Sequential(),)def forward(self, x): x1 = self.primary_conv(x) # Main convolution operation x2 = self.cheap_operation(x1) # Cheap transformation operationout = torch.cat([x1,x2], dim=1) # Concatenate bothreturn out[:,:self.oup,:,:]10
BlurPool
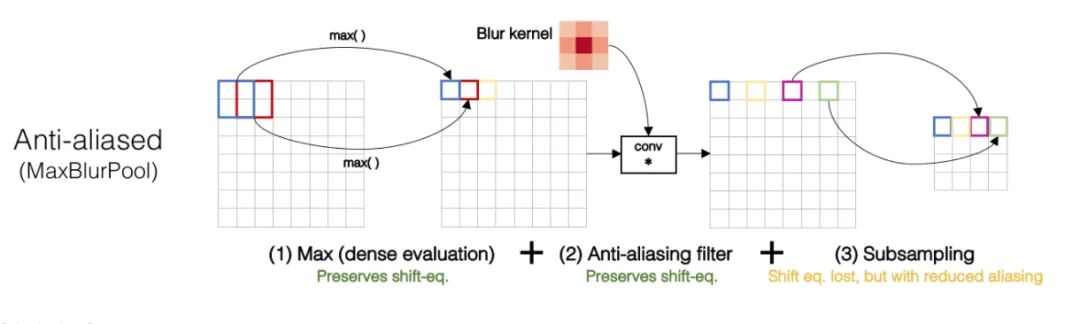
class BlurPool(nn.Module):def __init__(self, channels, pad_type='reflect', filt_size=4, stride=2, pad_off=0):super(BlurPool, self).__init__()self.filt_size = filt_sizeself.pad_off = pad_offself.pad_sizes = [int(1.*(filt_size-1)/2), int(np.ceil(1.*(filt_size-1)/2)), int(1.*(filt_size-1)/2), int(np.ceil(1.*(filt_size-1)/2))]self.pad_sizes = [pad_size+pad_off for pad_size in self.pad_sizes]self.stride = strideself.off = int((self.stride-1)/2.)self.channels = channels# Define a series of Gaussian kernelsif(self.filt_size==1): a = np.array([1.,]) elif(self.filt_size==2): a = np.array([1., 1.]) elif(self.filt_size==3): a = np.array([1., 2., 1.]) elif(self.filt_size==4): a = np.array([1., 3., 3., 1.]) elif(self.filt_size==5): a = np.array([1., 4., 6., 4., 1.]) elif(self.filt_size==6): a = np.array([1., 5., 10., 10., 5., 1.]) elif(self.filt_size==7): a = np.array([1., 6., 15., 20., 15., 6., 1.]) filt = torch.Tensor(a[:,None]*a[None,:]) filt = filt/torch.sum(filt) # Normalization to ensure that the total information remains constant after blur# Non-grad parameters are stored using buffer self.register_buffer('filt', filt[None,None,:,:].repeat((self.channels,1,1,1)))self.pad = get_pad_layer(pad_type)(self.pad_sizes)def forward(self, inp):if(self.filt_size==1):if(self.pad_off==0):return inp[:,:,::self.stride,::self.stride] else:return self.pad(inp)[:,:,::self.stride,::self.stride]else:# Use fixed parameters with conv2d+stride to implement blurpoolreturn F.conv2d(self.pad(inp), self.filt, stride=self.stride, groups=inp.shape[1])11
RFB
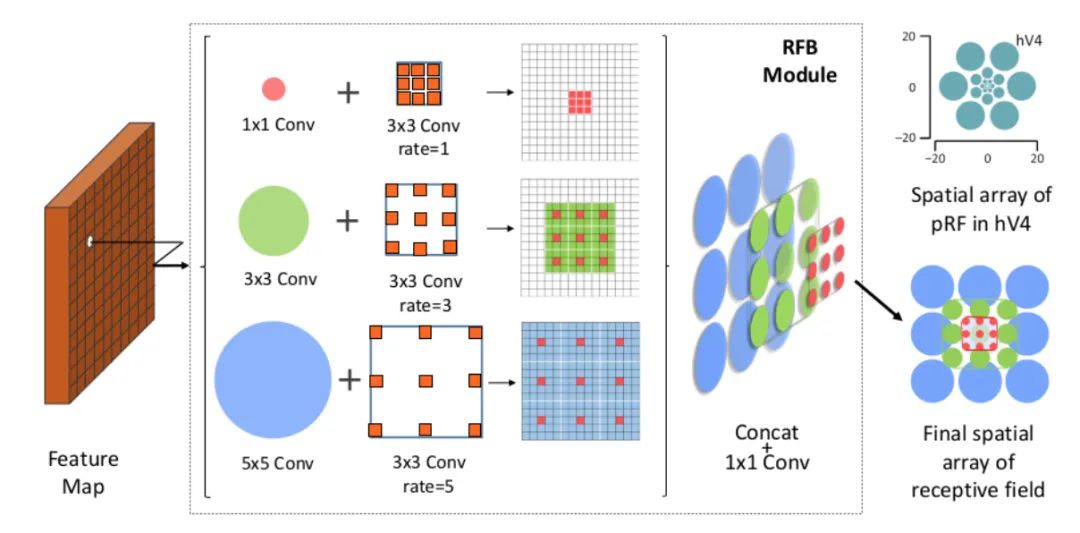
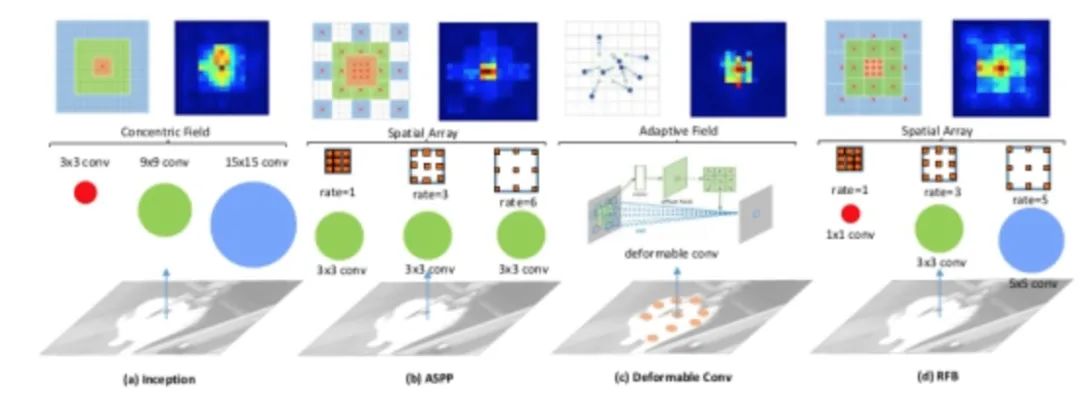
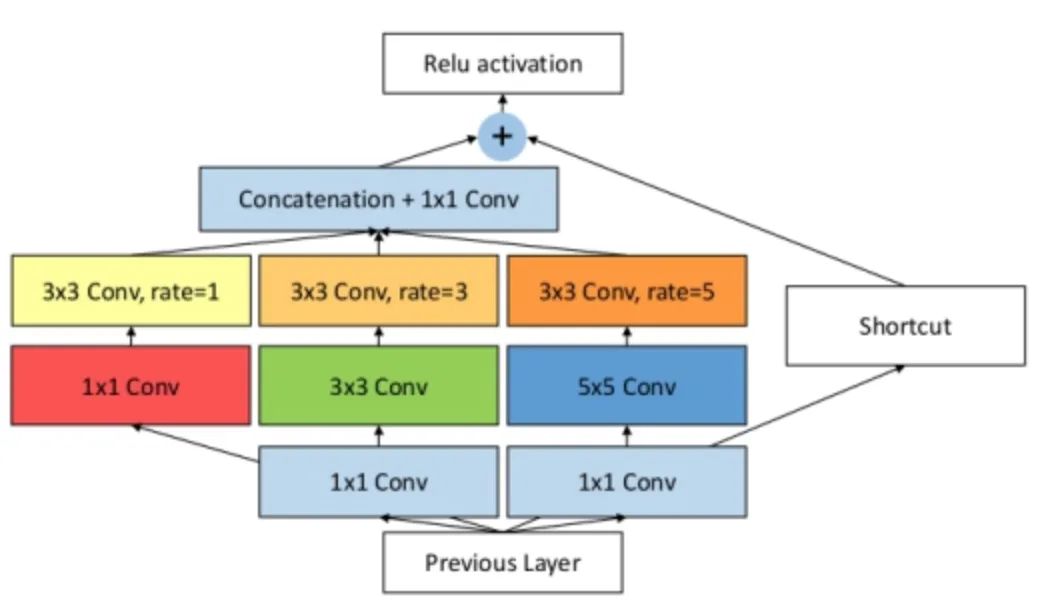
class RFB(nn.Module): def __init__(self, in_planes, out_planes, stride=1, scale = 0.1, visual = 1):super(RFB, self).__init__()self.scale = scaleself.out_channels = out_planes inter_planes = in_planes // 8# Branch 0: 1x1 convolution + 3x3 convolutionself.branch0 = nn.Sequential(conv_bn_relu(in_planes, 2*inter_planes, 1, stride), conv_bn_relu(2*inter_planes, 2*inter_planes, 3, 1, visual, visual, False))# Branch 1: 1x1 convolution + 3x3 convolution + dilated convolutionself.branch1 = nn.Sequential(conv_bn_relu(in_planes, inter_planes, 1, 1), conv_bn_relu(inter_planes, 2*inter_planes, (3,3), stride, (1,1)), conv_bn_relu(2*inter_planes, 2*inter_planes, 3, 1, visual+1,visual+1,False))# Branch 2: 1x1 convolution + 3x3 convolution*3 instead of 5x5 convolution + dilated convolutionself.branch2 = nn.Sequential(conv_bn_relu(in_planes, inter_planes, 1, 1), conv_bn_relu(inter_planes, (inter_planes//2)*3, 3, 1, 1), conv_bn_relu((inter_planes//2)*3, 2*inter_planes, 3, stride, 1), conv_bn_relu(2*inter_planes, 2*inter_planes, 3, 1, 2*visual+1, 2*visual+1,False))self.ConvLinear = conv_bn_relu(6*inter_planes, out_planes, 1, 1, False)self.shortcut = conv_bn_relu(in_planes, out_planes, 1, stride, relu=False)self.relu = nn.ReLU(inplace=False) def forward(self,x): x0 = self.branch0(x) x1 = self.branch1(x) x2 = self.branch2(x)# Scale fusionout = torch.cat((x0,x1,x2),1)# 1x1 convolutionout = self.ConvLinear(out)short = self.shortcut(x)out = out*self.scale + shortout = self.relu(out)return out12
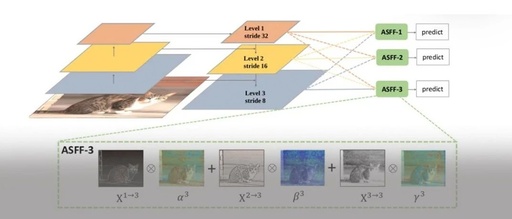
ASFF
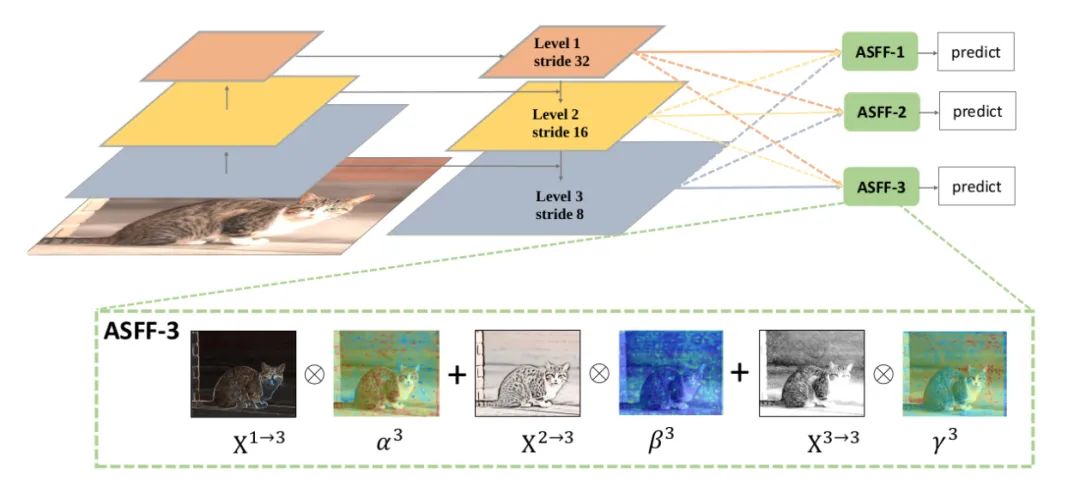
class ASFF(nn.Module):def __init__(self, level, rfb=False):super(ASFF, self).__init__()self.level = level# Input channels for the three feature layers, modify as neededself.dim = [512, 256, 256]self.inter_dim = self.dim[self.level]# The number of output channels for each layer must be consistentif level==0:self.stride_level_1 = conv_bn_relu(self.dim[1], self.inter_dim, 3, 2)self.stride_level_2 = conv_bn_relu(self.dim[2], self.inter_dim, 3, 2)self.expand = conv_bn_relu(self.inter_dim, 1024, 3, 1) elif level==1:self.compress_level_0 = conv_bn_relu(self.dim[0], self.inter_dim, 1, 1)self.stride_level_2 = conv_bn_relu(self.dim[2], self.inter_dim, 3, 2)self.expand = conv_bn_relu(self.inter_dim, 512, 3, 1) elif level==2:self.compress_level_0 = conv_bn_relu(self.dim[0], self.inter_dim, 1, 1)if self.dim[1] != self.dim[2]:self.compress_level_1 = conv_bn_relu(self.dim[1], self.inter_dim, 1, 1)self.expand = add_conv(self.inter_dim, 256, 3, 1) compress_c = 8 if rfb else 16self.weight_level_0 = conv_bn_relu(self.inter_dim, compress_c, 1, 1)self.weight_level_1 = conv_bn_relu(self.inter_dim, compress_c, 1, 1)self.weight_level_2 = conv_bn_relu(self.inter_dim, compress_c, 1, 1)self.weight_levels = nn.Conv2d(compress_c*3, 3, 1, 1, 0)# Scale sizes level_0 < level_1 < level_2def forward(self, x_level_0, x_level_1, x_level_2):# Feature Resizing processif self.level==0: level_0_resized = x_level_0 level_1_resized = self.stride_level_1(x_level_1) level_2_downsampled_inter =F.max_pool2d(x_level_2, 3, stride=2, padding=1) level_2_resized = self.stride_level_2(level_2_downsampled_inter) elif self.level==1: level_0_compressed = self.compress_level_0(x_level_0) level_0_resized =F.interpolate(level_0_compressed, 2, mode='nearest') level_1_resized =x_level_1 level_2_resized =self.stride_level_2(x_level_2) elif self.level==2: level_0_compressed = self.compress_level_0(x_level_0) level_0_resized =F.interpolate(level_0_compressed, 4, mode='nearest')if self.dim[1] != self.dim[2]: level_1_compressed = self.compress_level_1(x_level_1) level_1_resized = F.interpolate(level_1_compressed, 2, mode='nearest')else: level_1_resized =F.interpolate(x_level_1, 2, mode='nearest') level_2_resized =x_level_2# Fusion weights are also learned by the network level_0_weight_v = self.weight_level_0(level_0_resized) level_1_weight_v = self.weight_level_1(level_1_resized) level_2_weight_v = self.weight_level_2(level_2_resized) levels_weight_v = torch.cat((level_0_weight_v, level_1_weight_v, level_2_weight_v),1) levels_weight = self.weight_levels(levels_weight_v) levels_weight = F.softmax(levels_weight, dim=1) # alpha generation# Adaptive fusion fused_out_reduced = level_0_resized * levels_weight[:,0:1,:,:]+\ level_1_resized * levels_weight[:,1:2,:,:]+\\ level_2_resized * levels_weight[:,2:,:,:] out = self.expand(fused_out_reduced)return out13
Conclusion
This article has reviewed several ingeniously designed and practical CNN plugins from recent years, hoping that everyone can apply them effectively in their own projects.
Major Event
The GTIC 2021 Embedded AI Innovation Summit is officially launched! Four major sections showcase technological breakthroughs in embedded AI, the overall ecology, and application cases and practical explorations in the home AIoT, mobile robotics, and industrial manufacturing sectors. The audience registration channel is now fully open, and everyone can click on the poster to scan the code for registration. We will review and confirm as soon as possible.

Click the business card below
Follow us now
Your every “like” is treated as a favorite by me
▼